��Ʒ����

| ��Ŀ | LD-60 | LD-90 | ��ע | |
| 37031-���������� | 37041-�ڿڿڿڿ� | |||
| ������� | KYDEX | |||
| �ߴ磨��X��X�ߣ� | 699 X 500 X 383 mm | *��ʾ�߶Ȱ���W�����ߡ� | ||
| ����������أ� | 62 kg | |||
| ���� | �����¶� | 5 �� 40 °C | ||
| ����ʪ�� | ���ʪ��5��95% ����¶�� | |||
| ���л��� | ��������ʹ�ã�����ҳ�����ʴ������ | ����ֱ����ܵ��°�ȫ���ⷢ���� | ||
| �����ȼ� | IP20 | |||
| �ྻ�ȼ� | Fed Class 100��IS0 Class5 | |||
| ��Ŀ | LD-60 | LD-90 | ��ע | |
| 37031-�ڿڿڿڿ� | 37041-���������� | |||
| �ذ����� | �ذ�Ҫ�� | �ɻ�������ˮƽ���棨��ˮ�����͡������� | ||
| �ذ���Сƽ���� | Ff25 ��* ACI 117 ���� | * ACI 117������������Э��Ļ������ذ���� FFΪƽ���ȣ�FLΪˮƽ�ȡ�ƽ��������Խ�����ʾ�ذ�Խ ƽ����FF25��һ���൱���ɵĹ淶���� |
||
| �ɿ�Խ��̨�� | ���Ϊ15 mm * | ���Ϊ 10 mm * | *����LD-60��LD-90,��Խ��Щ̨��ʱ���ٶ���Ҫ�ﵽ 250-300 mm/s �� 250 mm/s�� �Ը����ٶȻ�Ƶ������ʻ������̨���϶�ϣ������̴��� ϵ�������������Խϵ��ٶ���ʻ��������Խ��Щ̨�ס�̨ ��Ӧ���ƽ����Բ�������� |
|
| �ɿ�Խ�ļ�϶ | ���Ϊ15 mm | ���Ϊ 15 mm | ||
| �������� | ����1:12 ���������Ϊ60 kgʱ������60 kgʱ����ƽ���ذ� | |||
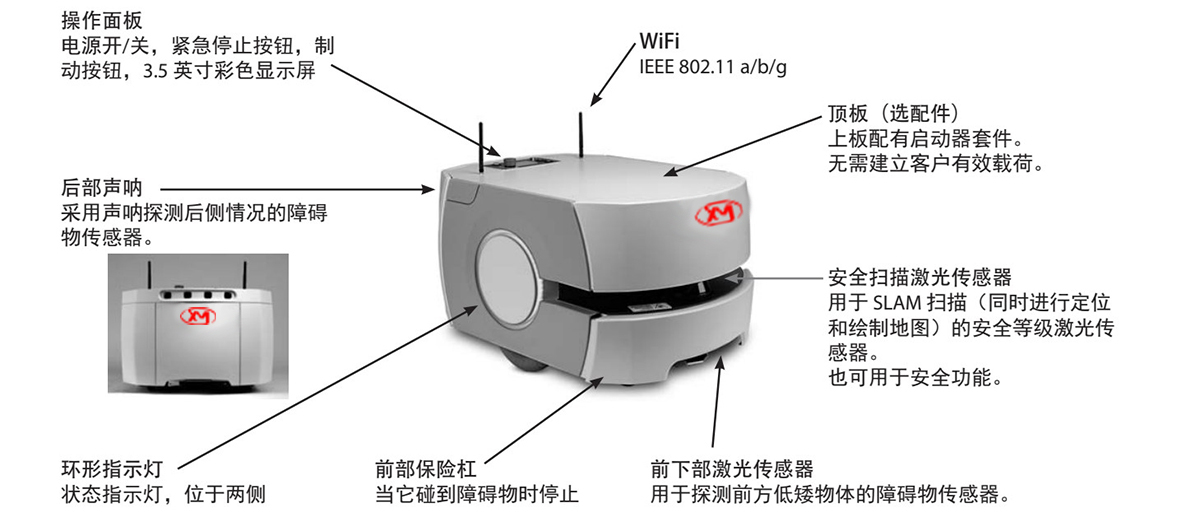
| ���� | ·��ѡ�� | ͨ�����ڻ���ӳ��İ�ȫɨ�輤�������ж�λ������ѡ��·���� | ||
| ������ͼ���Ʒ��� | ���SLAMɨ�裨ͬʱ���ж�λ�ͻ��Ƶ�ͼ�� | |||
| ��Ч�غ� | ������� | 60 kg | 90 kg | |
| �ƶ����� | ����ٶ� | 1800 mm/s | 1350 mm/s | |
| �����ת�ٶ� | 180 °/s | 180°/s | ||
| ֹͣλ�þ��� | �� 100 mm��λ�þ���*, ± 2°���ǶȾ��� | * ±10 mm��λ�þ��ȣ�±0.5�����ǶȾ��ȣ���ѡ�������� �£������߾��ȶ�λϵͳ�� | ||
| ������ | ���� | ��������ĭ����������� | ||
| �ߴ� | 200 ��ֱ����x 50mm �����Ƴߴ磩��2�� | |||
| �������� | ���� | �Ե��������������ľ�ϩ�� | ||
| �ߴ� | 75 ��ֱ����x 41 mm �����Ƴߴ磩��4�� | |||
| ��Դ | ��� | 22-30 VDC | ||
| ���� | �����ı������Ϊ72 Ah | |||
| ����ʱ�� ����Я����Ч�غ� ������£� |
Լ15Сʱ���������У� | |||
| ���ʱ�� | Լ4Сʱ������Ϊ5:1�� | |||
| ������� | 2000��������ڣ��������ֵ�� | |||
| ��緽�� | �Զ�/�ֶ� | |||
| ������ | DC 5 V ± 5%��1 A������Դ DC 12 V ± 5%��1 A������Դ DC 20 V ± 5%�� 1 A ������Դ DC 22〜30 V��4 A�û��õ�ص�Դx2 DC 22〜30 V��10 A�û��õ�ص�Դ* DC 22〜30 V��10 A��ȫ�õ�ص�Դ* |
DC 5 V��12 V��20 V��22〜30 V�ĵ�Դ�����ⲿ�豸���硣 *�û��õ�ص�Դ 10 A �Ͱ�ȫ�õ�ص�Դ 10 A | ||
| �� | ��ȫ�� | EN1525 / JIS D6802 / ANSI B56.5 | ||
| ���� | IEEE 802.11 a/b/g | |||
| ��ȫ���� | ��ȫɨ�輤��� �� | 1 ��λ��ǰ�� 1�� PLd ��ISO13849-1�� �����룺15 m ���Ƕȣ�240° |
||
| ����ֹͣ��ť | 1��λ�ڲ�������� | |||
| ������ | 2��λ�ں�2 m��Χ | ÿ����һ����������һ��������������һ���� | ||
| ǰ�����ո� | 1��λ��ƽ̨ǰ����2�Դ����� | |||
| ǰ�²�������� | 1��λ��ƽ̨ǰ����λ�ڵذ��Ϸ�63.5 mm�� | 270°��4 m��Χ��1�������۾���ȫ | ||
| �ಿ������� | ѡ���* | * 2��λ����Ч�غɽṹ�����࣬���û���װ | ||
| �źŵ� | �������һ������ָʾ�� | |||
| ������ | 3.5Ӣ�磬�����Ϊ80 W | ��Ƕ�����ϳ� | ||
| �������� | ��Ļ/���ذ� | 3.5Ӣ��TFT 320 x 240���أ�256 K��ɫ��Ļ | ||
| ��ť | “����”��ť����ɫ�� “�ر�”��ť����ɫ�� �ƶ��ͷŰ�ť����ɫ��Կ���أ�����“�ر�”��ť�� |
|||
| �û�I/F | �������� | IEEE 802.11 a/b/g | ||
| ��̫���˿� | 1 x �û� LAN�� 1 x ά�� LAN��Auto-MDIX | |||
| ���ж˿� | RS-232 x 2��CAN Bus B x 1 | |||
| ����I/O | 16�����룬16����� | |||
| ģ��I/O | 8�����루0��30 V����4�������0��20 V�� | |||
| ��Ƶ | ������Ƶ�������Ƶ����/��Ƶ��� | |||
| �ͺ� | 13495-200 |
| ����ϵͳ | Windows 7 (32 λ/64 λ�汾)/ Windows 8 (32 λ/64 λ�汾)/ Windows 10 (32 λ/64 λ�汾) |
| CPU | �Ƽ�ʹ��1.5 GHz˫��CPU |
| ���ڴ� | ��СΪ1.5 GB ���Ƽ�ʹ��4 GB�����ڴ棩 |
| Ӳ�� | ���ÿռ�����Ϊ200 MB |
| �Դ� | ��СΪ 256 MB |
| ��ʾ�� | XGA 1024 X 768�� 1600 ��ɫ |
| ͨ�Ŷ˿� | USB�˿ڣ���������֤��Կ�� |
| ֧�ֵ����� | ���Ӣ�� |
| �ͺ� | 11167-100 |
| �ߴ�-��X��X�� | 426.0 x 438.4 x 42.4 mm |
| ���� | 6.8 kg |
| ��װ���� | �ڱ�19Ӣ���豸������ ���1U���ܰ�װ |
| ��Դ | 100-240 VAC * |
| ���� | ���200W |
| �����¶� | 10 �� 35 °C |
| ����¶� | -25 �� 60 °C |
| ����ʪ�� | ���ʪ��8��90% ����¶�� |
| ���ʪ�� | 5��95 % ����¶�� |
| �ܷ����ȼ� | IP20 |
| CPU | Intel Xeon CPU |
| ���ڴ� | 4 GB DDR3 |
| �洢�� | 32 GB SSD |
| ͨ�Ŷ˿� | 10/100/1000 ��̫�� x 4, USB x 4, VGA |
| �ͺ� | 13605-000 |
| ���ذ� | PCAP������������5�㴥�أ���ɫ�߿�� �� |
| TFT��ʾ�� | TFTҺ����壬18/24λRGB���нӿڡ� 7.0Ӣ��WVGA -���ӽǣ�5�㴥�� |
| TFT��ʾ | TFTҺ����壬18/24λRGB���нӿڡ� 7.0Ӣ��WVGA -���ӽǣ�5�㴥�� |
| ���� | ����LED��Դ |
| ��Դ���� | ͨ����Դ�������ṩ5 VDC |
| ���� | ���Ϊ 6.5 W |
| �ͺ� | 13660-�� 00 | |
| ������ | ��� | 30 mm |
| ���� | 160 mm | |
| ������ȼ� | IP64 | |
| ���� | -40 �� 85 °C | |
| LED | ��Դ����λ�ĴŴ������ǣ��ұ�� | |
| �Ŵ� | ���� | 25 mm |
| ���� | �ϼ����� | |
| ��� ���Ŵ��� | ���� | 25 mm |
| ���� | ��500 mm/s�������ٶ���ʻʱ������ Ϊ 300 mm | |
| ���� | �������� | |
| ��Ŵ����� | 15 - 30 mm | |
| ���� | ǰ�������� | λ�ں��IJ����ϵ�RS232-1 (/dev/ ttyUSB9) |
| ������ | λ�ں��IJ����ϵ�RS232-2 (/dev/ ttyUSB10) | |
| ��Դ���������� �� | ������Դ��ʹ�ø����ķ��������� | |
| �ͺ� | 13700-��00 |
| ��Ұ��Χ | 140° |
| ��Դ���� | ͨ����Դ��������ƽ̨�ṩ12 VDC ��±10%�� |
| ���� | ���Ϊ 3.3 W |
| ��� | |
| �ͺ� | 12477-0��0 |
| ���� | 8 A * |
| ���� | 2 |
| ��Դ | 100 �� 240 VAC��50 �� 60 Hz |
| ���� | 800 W |
| ʪ�� | 5��95 % ����¶�� |
| �¶� | 5 �� 40 °C |
| �ߴ�-��X��X�� | 349 X 369 X 315 mm (495 X 495.5 X 317 mm) *2 |
| ���� | 8.2 kg |
| ��װ��ʽ | ���ǽ��֧�ܣ�ֱ�Ӱ�װ�ڵذ��ϣ���ʹ�õ� ���尲װ�ڵذ��� |
| ָʾ�� | ����-��ɫ ���-��ɫ |
| ������Դ�� | �����ڳ������ĵط�����س�� |
| �ͺ� | 13029-802 |
| �ߴ�-��X��X�� | 141.4 x 74.7 x 30 mm |
| ���� | 190 g |
| ��װ���� | ���ĸ��ݶ���װ���ṩ�ıڿ��� |
| ��Դ | 12 VDC |
| ���� | 0.5 A��6 W �����ͣ� |
| WiFi | 802.11 a/b/g/n |
| ͨ�Ŷ˿� | ��̫�� |
| I/O | ����x 2,���x 2 �����Ϊ30 VDC��2 A�� |
| ��� | |
| �ͺ� | 18578-000 |
| ����ʱ�� ����Я����Ч�غɵ�����£� |
Լ15Сʱ���������У� |
| ���� | 19 kg |
| ��ѹ | 22-30 VDC |
| ���� | 72 Ah �������ı�������� |
| ���ʱ�� | Լ 4 Сʱ |
| ʹ������ | 2000��������ڣ��ŵ����Ϊ80%ʱ������ ������ֵ����16Сʱ/�죬5��/�� |
| �ͺ� | 13558-000 |
| ���� | 550 g |
| �����ȼ� | IP56 |
