产品中心

| HM系列是DENSO水平多关节机器人中臂最长、可搬运质量最大的一个系列,您可从其丰富的产品阵容中,挑选最符合您需求的一款。 最大工作范围 :600~1,000mm 最大可搬运质量 :20kg 标准循环时间 :0.29・ 0.31秒 重复定位精度 :±0.02・ 0.025mm |
 |
规格
| 项 目 | 规 格 | |||||||||
| 机器人(*1) | HHM-4060* | HM-4A60* | HM-4070* | HM-4A70* | HM-4085* | HM-4A85* | HM-40A0* | HM-4AA0* | ||
| 轴数 | 4 | |||||||||
| 位置检测方式 | 绝对编码器 | |||||||||
| 驱动电机/制动器 | 全轴AC伺服电机/Z轴重力平衡气缸/Z轴带制动器 | |||||||||
| 臂全长(第1臂+第2臂) | 600(250+350)mm | 700(350+350)mm | 850(350+500)mm | 1000(500+500)mm | ||||||
| 运行角度、行程及电机容量 | J1(第1轴) | ±165° | ||||||||
| J2(第2轴) | ±143° | ±147° | ||||||||
| Z(第3轴) | *=2 : 200mm, *=3 : 300mm, *=4 : 400mm | |||||||||
| T(第4轴) | ±360° | |||||||||
| 最大可搬运质量 | 10kg | 20kg | 10kg | 20kg | 10kg | 20kg | 10kg | 20kg | ||
| 最大合成速度 | J1 | 449.74deg/sec | 412.26deg/sec | 374.78deg/sec | ||||||
| J2 | 667.5deg/sec | 611.87deg/sec | 556.25deg/sec | |||||||
| Z | 2764.88mm/sec | 2764.88mm/sec | ||||||||
| T | 2229.93deg/ sec |
1544.51deg/ sec |
2229.93deg/ sec |
1544.51deg/ sec |
2229.93deg/ sec |
1544.51deg/ sec |
2229.93deg/ sec |
1544.51deg/ sec |
||
| 标准循环时间(*2) | 0.29sec | 0.31sec | ||||||||
| 重复定位精度 (工具安装面中心)(*3) |
J1+J2 | ±0.02mm | ±0.025mm | |||||||
| Z | ±0.01mm | |||||||||
| T | ±0.005° | |||||||||
| 最大输入压力(向下,1秒以下) | 98N | |||||||||
| 最大容许惯性力矩(惯性) | 0.25kgm2 | 0.45kgm2 | 0.25kgm2 | 0.45kgm2 | 0.25kgm2 | 0.45kgm2 | 0.25kgm2 | 0.45kgm2 | ||
| 用户空气配管 | 4系统(φ6) | |||||||||
| 用户信号线 | 24芯(接近传感器等的信号线) | |||||||||
| 空气源 | 常用压力 | 0.05~0.35MPa | ||||||||
| 最大容许压力 | 0.59MPa | |||||||||
| 空气传播噪音(A加权当量连续音压级) | 80dB以下 | |||||||||
| 保护等级 | 防尘防溅型:IP65(选购件) | |||||||||
| 质量 | 约53~56kg | |||||||||
*1:型号中的“*”表示Z轴行程。
*2:负载2kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
*3:重复定位精度是周围环境温度恒定时的精度。
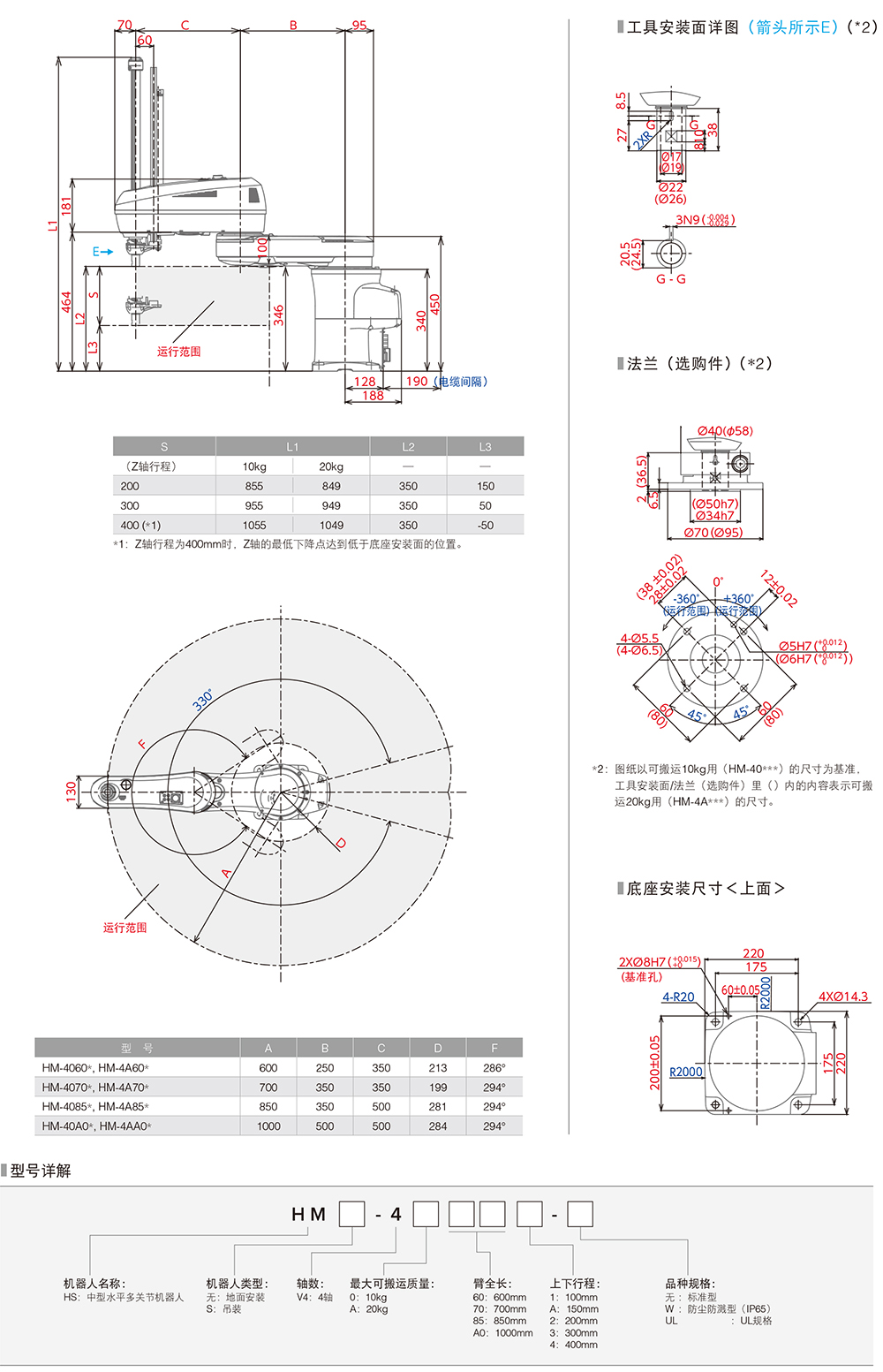
外形尺寸与运行范围 单位:mm